成果名称:跨行走机器人
研发人员:黄建龙
所属领域:计算机机器人
完成单位:泉州师范学院
项目简介:
目前,中国已成为世界上增长最迅速的工业机器人市场。尽管如此,中国目前的制造业机器人密度仍远低于发达国家,甚至不足世界平均水平的二分之一。劳动力成本上升、中国产业升级对高端装备的强劲需求将推动工业机器人应用持续快速的发展。
该成果综合了电子学、机械、自动控制、计算机软硬件、传感器、生物机械学、材料科学、模具、精密加工等多门学科。行走机器人的研究无疑对促进科技的发展和人类的进程有重大的现实意义,是当今科技的一种必然趋势,为机电产品的研究提供一种新的途径。特别是行走机器人技术的发展往往代表一个国家的科技实力和机电一体化的最新产品。
从整体结构来看,机器人整体由顶盖、身体外壳以及机器人的脚三大部分组成。
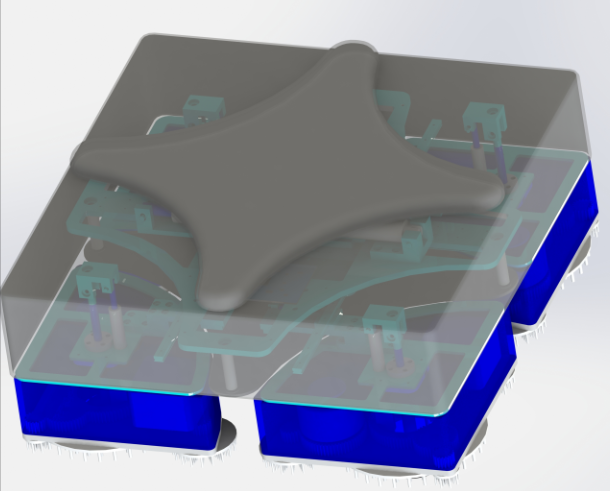
图1:机器人的整体结构(a)
当把机器人的顶盖拆开后,机器人的结构如图所示。内部主要有扩展模块、继电器、输入光耦模块、通讯模块和电动推杆等组成。整个机器人主要通过内部结构的运动,来实现机器人的移动。
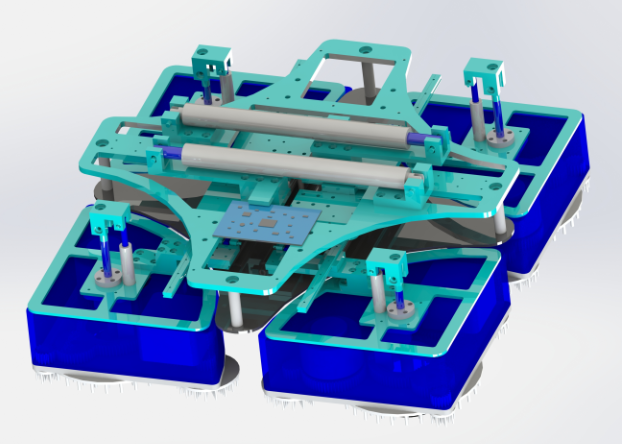
图2:机器人的内部结构(b)
从图书可以上看到整个机器人由上往下的一些身体机构。首先外部是一个四圆角星星顶盖,接着往下是导轨等一些内部零件。
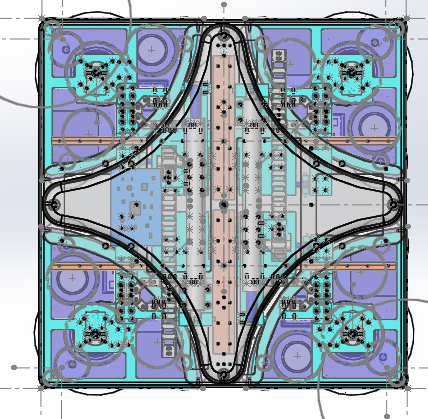
图3:机器人部分身体机构模型图(c)
从图上可以很直观的看到机器人的身体内部结构和组成,以及四个角的设计。
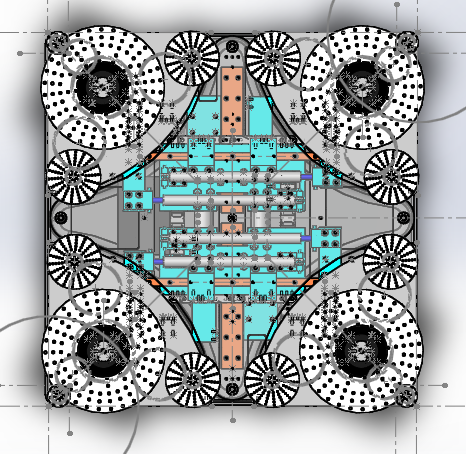
图4:机器人的身体剖析图。