3月29日下午,由交通与航海学院智能车创新协会主办的智能小车竞赛在浅水湾大楼智能汽车实验室圆满落幕。来自智能车辆工程专业和轮机工程专业的7位选手参加比赛,2025级智能车辆工程专业陈梁铭、林毅涛、黄锦泰同学获一等奖,2025级轮机工程专业陈凯、陈庆文和2025级智能车辆工程专业程煜坤同学获二等奖,2025级智能车辆工程专业徐斌星同学获三等奖。

本次竞赛聚焦电磁循迹技术应用,赛道采用1:10缩微电磁赛道标准搭建,全长约35米,设置直道、V型弯、连续60°弯道及十字交叉路段等复杂路况,对智能小车的控制精度、路径规划能力提出严苛考验。与传统光电、视觉循迹方案不同,参赛的电磁组小车均依靠车头工字电感传感器,感应赛道中央20kHz电磁导引线实现自主行驶,通过实时采集场强信号、计算行驶偏差,借助PID等算法自主调节舵机与电机,全程由单片机独立控制,无任何人工遥控操作,充分体现智能化、自主化设计要求。
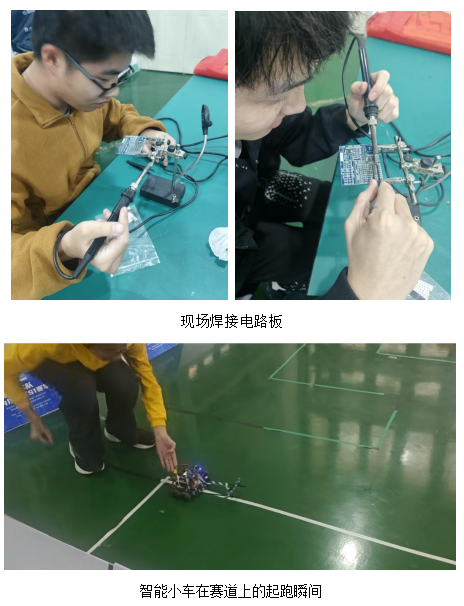
为备战此次竞赛,各参赛队伍赛前开展了长时间的技术攻坚与车辆调试工作。2025级智能车辆工程专业“极光队”队长陈梁铭介绍,队伍针对车辆在连续S弯出现的甩尾问题,排查出是差速算法积分项过大导致,通过重新调校参数成功解决问题;该队打造的智能小车采用轻量化底盘,搭载队员手工焊接的STM32核心板,四电感一字排布的设计兼顾了行驶稳定性与运行效率。赛前各队伍的精研细磨,为赛场的精彩比拼奠定了坚实基础。
下午3点,竞赛正式拉开帷幕。比赛设置两轮行驶机会,取最佳成绩作为最终成绩,若车辆冲出赛道则本轮成绩无效。“追风者”队率先登场,车辆起步稳健、直道加速流畅,顺利通过直角弯,但在连续V弯处因车身摆动冲出赛道。面对突发状况,队员们迅速现场分析问题、修改参数,以赛促练、即时复盘,展现出良好的临场应变能力与团队协作精神,赛场之上,各队伍的精彩表现让现场充满科技竞技的魅力。
此次竞赛的评委吕培杰博士表示,竞赛的意义不仅在于成绩的比拼,更是工程实践中最宝贵的财富。本次智能小车竞赛不仅为智能汽车爱好者搭建了交流学习、展示、比拼的平台,还为培养学生的工程实践能力、创新思维与团队协作能力提供了有力支撑。
